주행 중 건물 촬영 이미지
- 분야교통물류
- 유형 이미지
-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.0 2021-06-25 데이터 최초 개방 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2022-10-13 신규 샘플데이터 개방 소개
GNSS 취약 지역에서 위치를 인식하기 위한 영상 및 이미지, 센서 데이터
구축목적
GNSS 취약 지역에서의 위치인식을 위한 데이터셋
-
메타데이터 구조표 데이터 영역 교통물류 데이터 유형 이미지 데이터 형식 데이터 출처 라벨링 유형 라벨링 형식 데이터 활용 서비스 데이터 구축년도/
데이터 구축량2020년/200만 -
구축 내용 및 제공 데이터량
- 200만 건 이상 의 건물 및 랜드마크 포함 이미지, 동영상, Lidar, GNSS/INS 데이터
- 시멘틱 포인트 클라우드 정밀지도 1건
구축내용 및 제공 데이터량 표1 이미지 프레임 AI 학습용
데이터 구축객체
폴리곤건물면 건물 빌딩, 집, 다리, 고가도로 등 18.2만 도로면 도로면
표지차선, 안전지대선, 마름모,
화살표, 횡단보도 등78.2만 도로 객체 분리구조물 방음벽, 가드레일, 펜스 6만 객체
바운딩박스도로 객체 세로 기둥 가로수, 전봇대, 신호등 기둥,
표지판 기둥, 가로등, 소화전,
인도 침범 방지 기둥 등54.3만 교통표지판 모든 종류의 교통 표지판 27만 신호등 모든 종류의 신호등 15.3만 터널 내
객체환기 기구 터널 내 대형 팬, 굴뚝 같은
형상물0.09만 소화 기구 소화전 등 0.31만 비상·유도등 터널 내 비상등, 유도등 0.6만 구축내용 및 제공 데이터량 표2 포인트 클라우드 정밀지도 AI 학습용
데이터 구축객체
시멘틱
세그멘
테이션건물면 건물 빌딩, 집, 다리, 고가도로 등 시멘틱 포인트
클라우드
정밀지도 1건도로면 도로면
표지차선, 안전지대선, 마름모,
화살표, 횡단보도 등도로 객체 분리구조물 방음벽, 가드레일, 펜스 도로 객체 세로 기둥 가로수, 전봇대, 신호등 기둥,
표지판 기둥, 가로등, 소화전,
인도 침범 방지 기둥 등교통표지판 모든 종류의 교통 표지판 신호등 모든 종류의 신호등 터널 내
객체환기 기구 터널 내 대형 팬, 굴뚝 같은
형상물소화 기구 소화전 등 비상·유도등 터널 내 비상등, 유도등
-
-
AI 모델 상세 설명서 다운로드
AI 모델 다운로드 -
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 객체 포지셔닝 Object Detection DeepLab v3+(이미지 폴리곤), YOLO v3(이미지 바운딩박스) mIoU 80 % 80.4 % 2 픽셀별 분할 처리 Segmentation DeepLab v3+(이미지 폴리곤), YOLO v3(이미지 바운딩박스) OA 80 % 93 % 3 포인트별 분할 처리 Segmentation DeepLab v3+(이미지 폴리곤), YOLO v3(이미지 바운딩박스) OA 70 % 78.9 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드데이터 변경이력
주행 중 건물 촬영 이미지-데이터변경이력 버전 일자 변경내용 비고 1.0 2021.06.25 데이터 최초 개방 구축 목적
- GNSS 취약 지역에서의 위치인식을 위한 데이터셋
활용 분야
- 자율주행, 위치추정, SLAM
소개
- GNSS 취약 지역에서의 위치인식을 위한 이미지 객체 검출 학습데이터 및 Lidar, 포인트 클라우드 시멘틱 세그멘테이션 정밀지도 등 자율주행에 활용 가능한 데이터
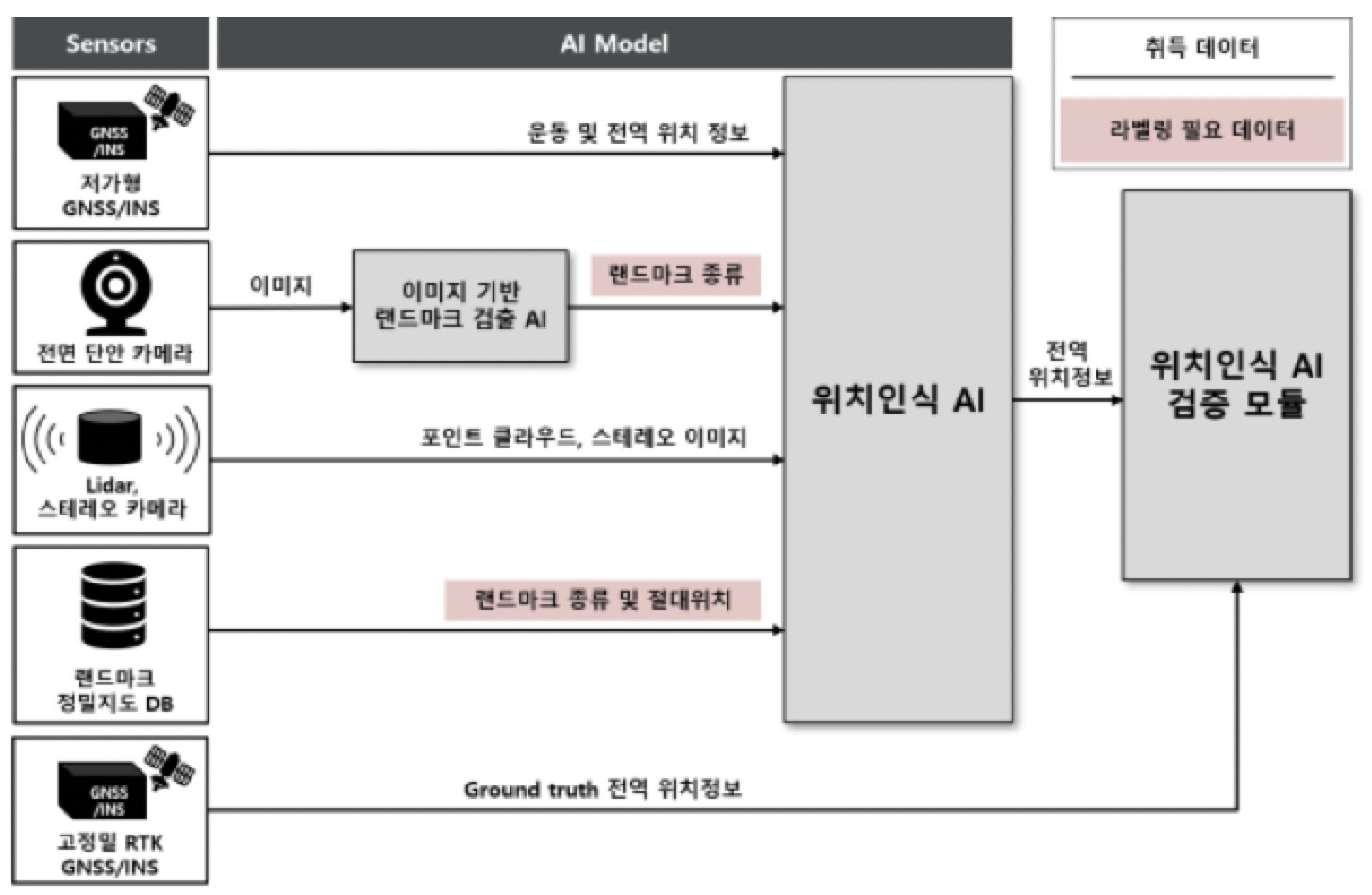
- 주변국으로부터 보정되지 않은 GNSS 정보는 위성신호 도심, 지하차도 및 터널 등 취약 지역에서 위치인식 신뢰도를 악화시키는 원인으로 작용
- 랜드마크 정밀지도와 자율주행에 사용되는 다양한 주변환경 인식 센서 정보 융합을 통해 GNSS 취약 지역에서도 신뢰도 높은 위치인식 필요
- 다양한 센서 원천데이터 및 학습데이터 공개를 통해 자율주행 관련 위치 및 주변환경 인식을 통한 기술개발에 자유롭게 활용할 수 있도록 함
- 도심, 지하차도 및 터널 포함 지역에 대한 다양한 랜드마크 측정 데이터 수집
구축 내용 및 제공 데이터량
- 200만 건 이상 의 건물 및 랜드마크 포함 이미지, 동영상, Lidar, GNSS/INS 데이터
- 시멘틱 포인트 클라우드 정밀지도 1건
구축내용 및 제공 데이터량 표1 이미지 프레임 AI 학습용
데이터 구축객체
폴리곤건물면 건물 빌딩, 집, 다리, 고가도로 등 18.2만 도로면 도로면
표지차선, 안전지대선, 마름모,
화살표, 횡단보도 등78.2만 도로 객체 분리구조물 방음벽, 가드레일, 펜스 6만 객체
바운딩박스도로 객체 세로 기둥 가로수, 전봇대, 신호등 기둥,
표지판 기둥, 가로등, 소화전,
인도 침범 방지 기둥 등54.3만 교통표지판 모든 종류의 교통 표지판 27만 신호등 모든 종류의 신호등 15.3만 터널 내
객체환기 기구 터널 내 대형 팬, 굴뚝 같은
형상물0.09만 소화 기구 소화전 등 0.31만 비상·유도등 터널 내 비상등, 유도등 0.6만 구축내용 및 제공 데이터량 표2 포인트 클라우드 정밀지도 AI 학습용
데이터 구축객체
시멘틱
세그멘
테이션건물면 건물 빌딩, 집, 다리, 고가도로 등 시멘틱 포인트
클라우드
정밀지도 1건도로면 도로면
표지차선, 안전지대선, 마름모,
화살표, 횡단보도 등도로 객체 분리구조물 방음벽, 가드레일, 펜스 도로 객체 세로 기둥 가로수, 전봇대, 신호등 기둥,
표지판 기둥, 가로등, 소화전,
인도 침범 방지 기둥 등교통표지판 모든 종류의 교통 표지판 신호등 모든 종류의 신호등 터널 내
객체환기 기구 터널 내 대형 팬, 굴뚝 같은
형상물소화 기구 소화전 등 비상·유도등 터널 내 비상등, 유도등
대표도면

< 이미지 원본 >

< 이미지 객체 검출 >
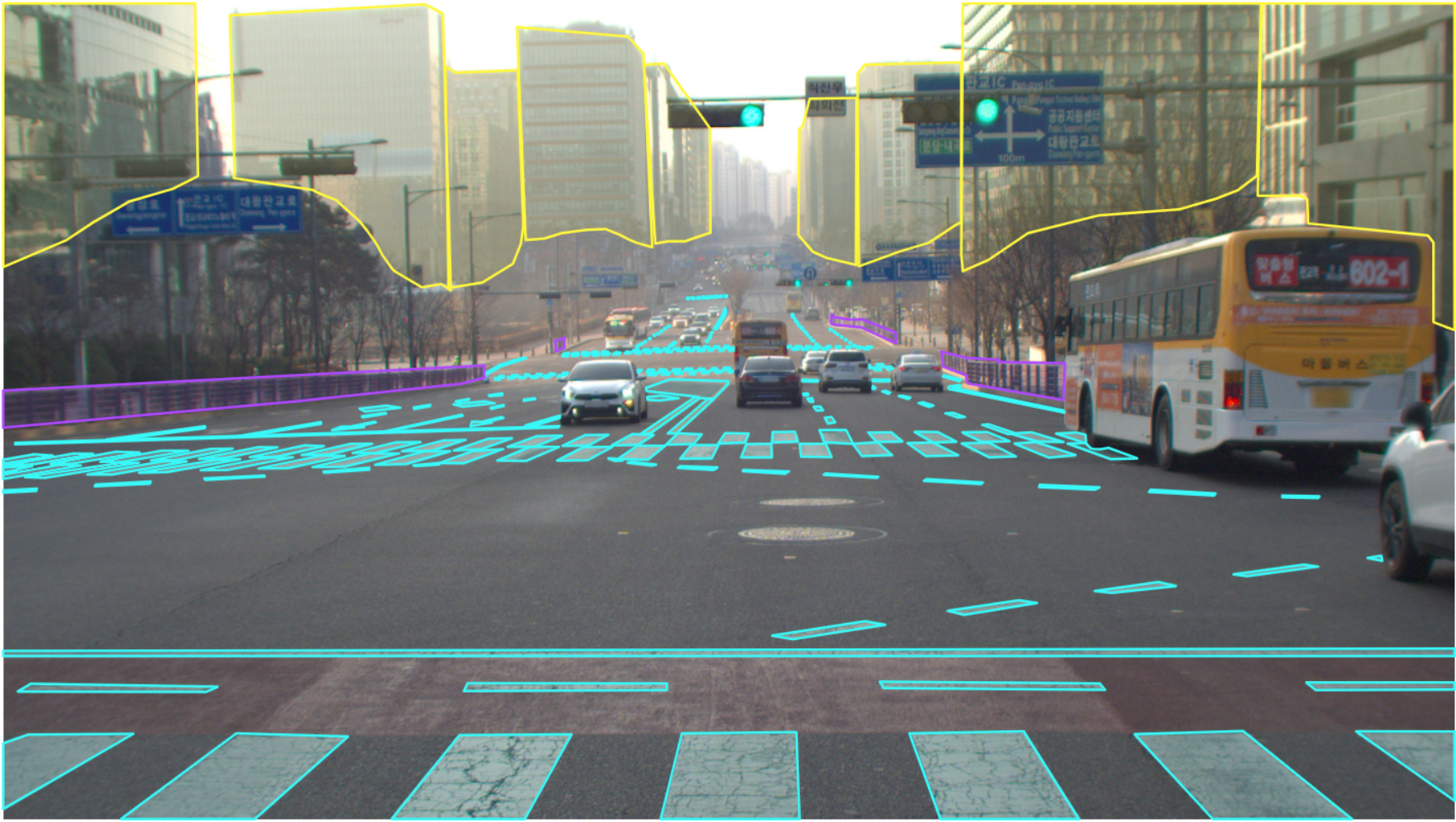
< 이미지 시멘틱 세그멘테이션 >
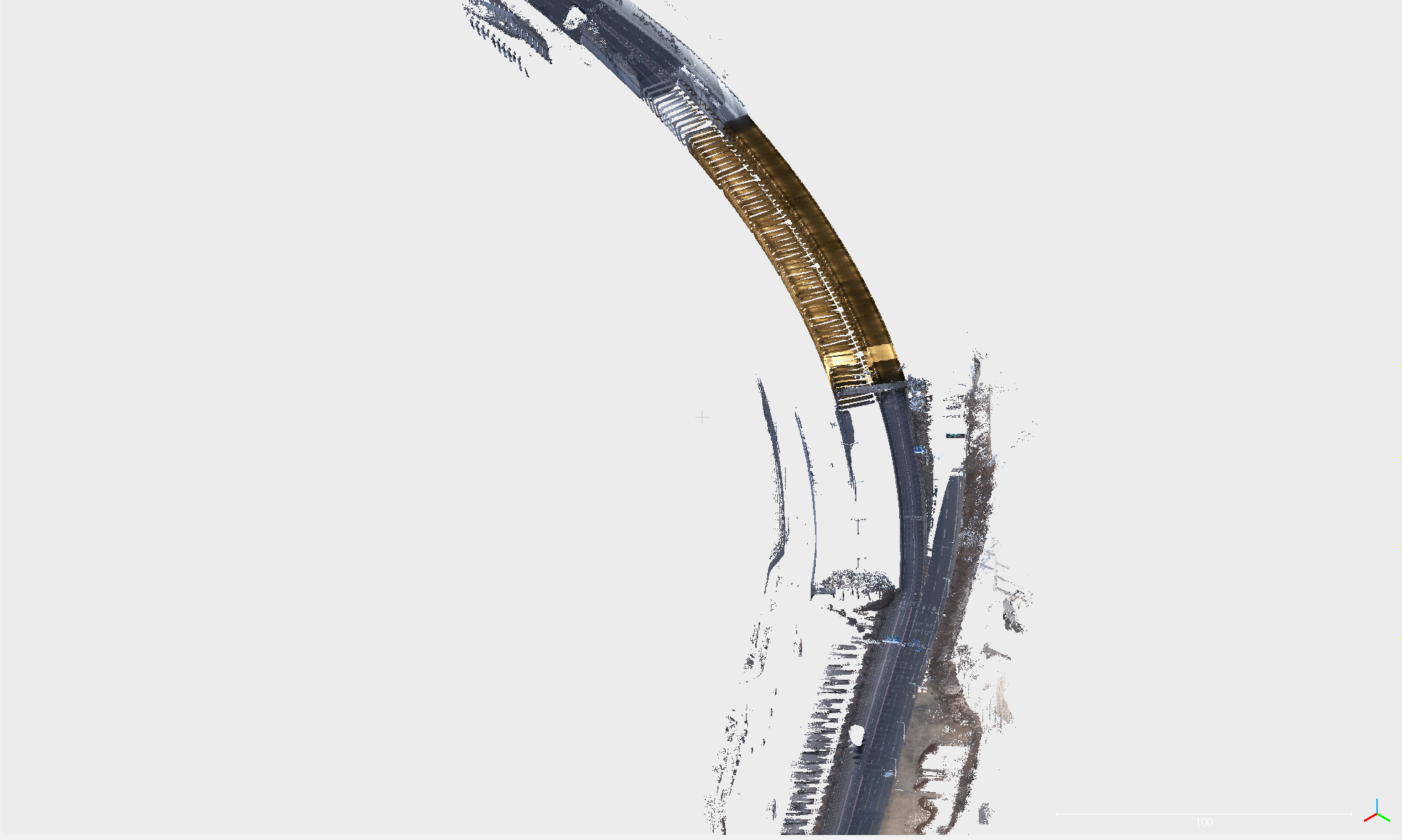
< 포인트 클라우드 정밀지도 원본 >
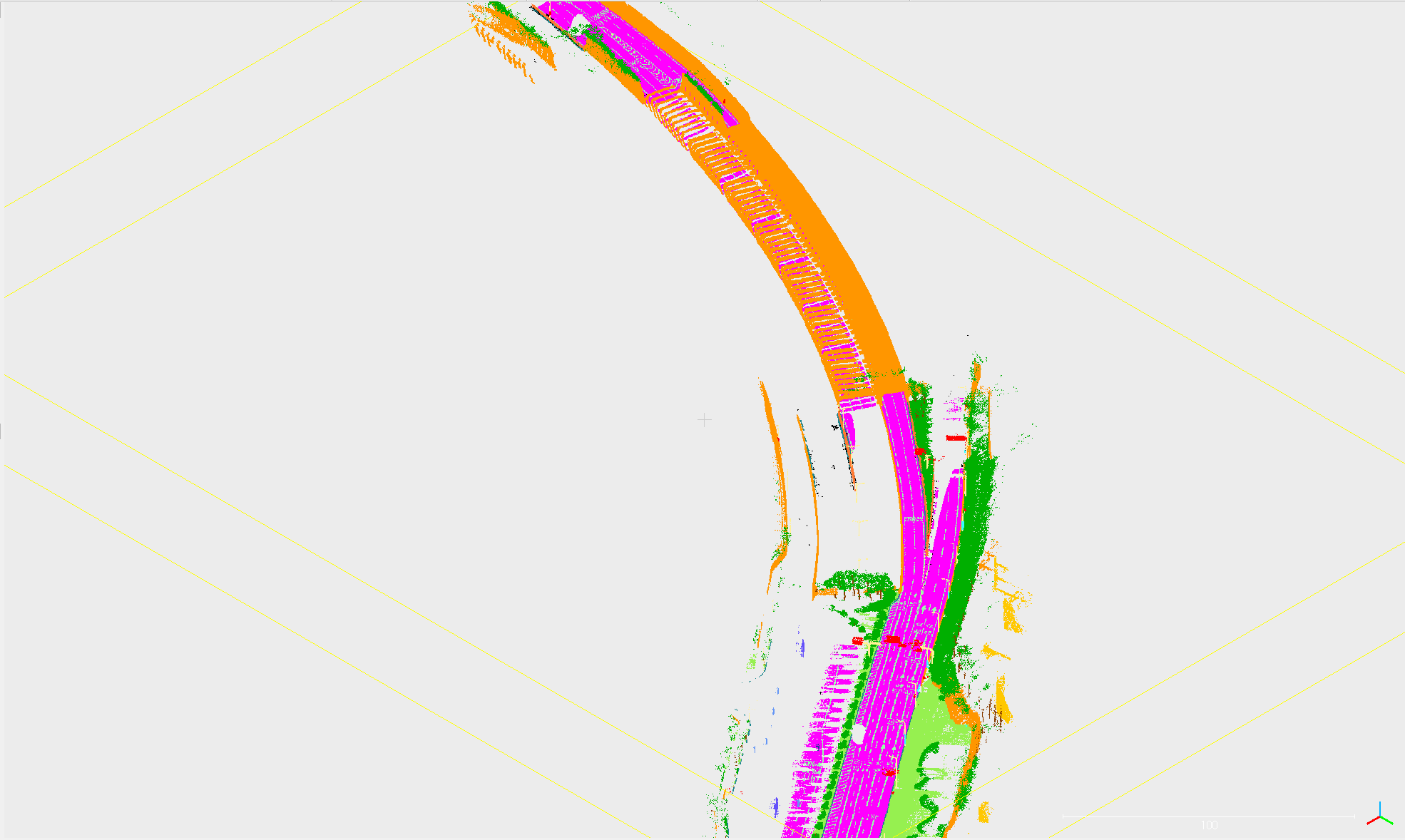
< 시멘틱 포인트 클라우드 정밀지도 >
필요성
- Level 4 이상의 자율주행을 위해 GNSS 음영 지역(도심, 지하차도, 터널 등) 내 안정적 정밀 위치 정보 필수
- SLAM 또는 Deep learning 기반 위치 추정 AI 기술 연구를 위한 GNSS 불능 지역의 학습 데이터 셋 필요
- 정밀지도와 인식 AI를 이용한 위치추정 AI 연구 개발에 활용 가능
- 이를 위해 이미지 뿐 아니라, 포인트 클라우드, 스테레오 이미지, GNSS/INS, 고정밀 MMS 기반 정밀지도 등 자율주행 개발에 필요한 추가 데이터 필요
데이터 구조
- 데이터 구성
1. 데이터 폴더 구성
- 시간, 주행 코스, 방향, in-out 주행여부, 날씨에 따라 폴더를 생성하여 데이터 분류
예) 20201229_11_CW_in_D_S
2. 데이터 취득에 관한 메타데이터
- 이미지 취득 장비, 포인트 클라우드 취득 장비 등 취득에 관한 기타 정보를 메타데이터로서 작성하여 ‘데이터셋상세설명’에 첨부하고자 함
3. 데이터 Naming
- <영상촬영일>_<수정여부>_<코스>_<코스형태>_<촬영 시간>_<날씨>_<원본순서>_<캡처프레임> 순서로 표기
예) 200819_R_16_CW_in_D_B_004_00006 (2020년 8월 19일에 촬영한 4번째 영상 6번째 Frame)데이터 Naming 표 구분 이름 설명 Date YY, MM, DD 년도, 월, 일 수정 여부 R Raw(원본) E Edited(수정) 코스 N N번 코스 코스 형태 CW or CCW 코스 주행 형태 in or out 원본 영상순서 N N번째 영상 캡쳐 프레임 N N번째 프레임 촬영 시간 D Day(낮) E Evening/Morning(일몰/출) N Night(밤) 날씨 B Bright(맑음) C Cloudy(흐림) S Snowy(눈) F Foggy(안개) R Rainy(밤) - 어노테이션 포맷
1. 이미지어노테이션 포맷 이미지 표 NO 항목명 항목설명 타입 필수구분 단위 1 데이터셋 정보 데이터셋 전체에 관한 전반적인 정보를 포함하는 메타데이터 object 1 1-1 데이터셋 상세설명 str Y 1-2 데이터셋 담당기관 str 1-3 데이터셋 생성일자 datetime Y 2 이미지 정보 데이터셋을 구성하는 각 이미지에 대한 메타데이터 및 학습 데이터 List 2 2-1 이미지 식별자 int Y 2-2 이미지 너비 int Y pixel 2-3 이미지 높이 int Y pixel 2-4 이미지 파일명 str Y 3 이미지 어노테이션 정보 데이터셋의 어노테이션에 대한 메타데이터 및 학습 데이터 List 2 3-1 어노테이션 식별자 int Y 3-2 연관 이미지 식별자 int Y 3-3 어노테이션 카테고리 int Y 3-4 세그멘테이션 정보 RLE or [polygon] Y 3-5 세그멘테이션 넓이 float 3-6 바운딩박스 정보 [x, y, width, height] Y 3-7 단일 개체/개체군 정보 0 or 1 4 카테고리 정보 어노테이션의 카테고리 정보에 대한 메타데이터 및 학습 데이터 List 1 4-1 카테고리 식별자 int Y 4-2 카테고리 이름 str Y 4-3 상위 카테고리 str
2. 포인트 클라우드어노테이션 포맷 포인트 클라우드 표 NO 항목명 항목설명 타입 필수구분 단위 2 포인트클라우드 정보 데이터셋을 구성하는 각 포인트클라우드 대한 메타데이터 및 학습 데이터 List 2 2-1 포인트클라우드생성일자 Number Y 2-2 포인트클라우드파일명 String Y 2-3 프레임순서/타일번호 String Y 3 포인트클라우드어노테이션정보 데이터셋의 어노테이션에 대한 학습 데이터 List 3 3-1 어노테이션데이터 Number Y
-
데이터셋 구축 담당자
수행기관(주관) : 건국대학교 산학협력단
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 조기춘 02-2049-6265 [email protected] · 사업 총괄 · 데이터 설계 · AI모델 개발 수행기관(참여)
수행기관(참여) 기관명 담당업무 딥비전스 · 데이터 설계 지원
· AI 모델 개발 지원스타마타 · 원천 데이터 수집 및 정제
· 데이터 가공, 검수, 크라우드소싱 관리
· 저작도구 개발공간정보산업진흥원 · 데이터 검수, 크라우드소싱 관리 에이스랩 · AI 모델을 활용한 응용서비스 개발 (GNSS 취약 지역에서의 자율주행을 위한 위치 인식 서비스) 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 조기춘(건국대학교 산학협력단) 02-2049-6265 [email protected]
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 [email protected] 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.