-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.1 2023-12-15 데이터 최종 개방 1.0 2023-07-24 데이터 개방(Beta Version) 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2023-12-15 산출물 전체 공개 소개
ㅇ지능형 터널 및 지하차도 데이터는 LiDAR, RGB, NIR 데이터의 3종류로 분류됨 ㅇRGB 및 NIR 이미지 데이터는 2차원의 이미지 데이터로 시설물 식별을 위한 데이터 셋임 ㅇLiDAR 데이터는 3차원 형식의 데이터로 시설물 식별과 함께 시설물의 위치를 확인하기 위한 데이터셋
구축목적
ㅇ터널 및 지하차도의 시설물 관리 및 자율주행 차량의 터널 내 측위기술 개발을 위한 인공지능 학습용 이미지(NIR/RGB/LIDAR) 데이터 구축
-
메타데이터 구조표 데이터 영역 교통물류 데이터 유형 이미지 데이터 형식 jpg, 데이터 출처 실제 환경에서 자체 수집 라벨링 유형 바운딩박스, 큐보이드 라벨링 형식 JSON 데이터 활용 서비스 ㅇ 터널 및 지하차도 등 도로 시설물 관리를 위한 인공지능 모델 개발 ㅇ 자율주행차량의 터널 내 측위 기술에 적용할 수 있는 시설물 인식용 인공지능 모델 개발 ㅇ 시설물 안전성 확보 및 사고 선제적 대응을 위한 효율적인 유지보수 체계 구축 데이터 구축년도/
데이터 구축량2022년/총 : 2,198,954 건(참조 데이터 제외) (원천데이터) ①NIR : 413,943건 ②RGB : 384,9940건 ⓷Lidar : 300,258건 (라벨링데이터) ①NIR : 413,943건 ②RGB : 384,9940건 ⓷Lidar : 300,258건 ⓸calib:564건 (참조데이터)①증강데이터: 514,538건 ②측위데이터 : 30개 터널 -
■ 데이터 구축규모
■ 데이터 구축규모 데이터 종류 가공 방식 데이터 형태 데이터 규모 비고 인공지능학습용 RGB Box 원천 JPG 384,994장 라벨링 JSON 384,994개 NIR Box 원천 JPG 413,943장 라벨링 JSON 413,943개 LiDAR Cuboid 원천 PCD 300,258장 라벨링 JSON 300,258개 캘리브레이션 JSON 564개 환경정보 증강 이미지 Box 원천 JPG 257,269장 데이터 라벨링 JSON 257,269개 측위데이터 SHAPE - SHP 30개 터널 GIS데이터 ※ 인공지능학습용 RGB/NIR/LiDAR 데이터는 장비 특성을 최대한 활용하여 수집한 데이터로 서로 독립적임
단, LiDAR 데이터 가공을 위해 RGB 데이터를 참조하였으며 AI 모델도 3개 데이터를 기준으로 3개의 탐지 모델을 각각 적용함
※ 증강 이미지 데이터는 조명이 꺼진 상태의 이미지 참조용 데이터로 제작되어, 구문적 정확성과 의미적 정확성 검사에서 제외함
※ 측위데이터는 시설물의 위치정확도 확인을 위한 참조용 데이터임.■ 인공지능학습용 원천 데이터 분포(1레벨)
■ 인공지능학습용 원천 데이터 분포(1레벨) 2레벨 3레벨 4레벨 이미지수 합계 (가공타입) (이미지종류) (Sequence) BBOX RGB Sequence0001 ~ 0004 1,730 384,994 Sequence0006 ~ 0006 800 Sequence0008 ~ 0010 704 Sequence0013 ~ 0033 9,806 Sequence0035 ~ 0056 20,477 Sequence0058 ~ 0092 5,407 Sequence0094 ~ 0101 3,446 Sequence0103 ~ 0161 19,719 Sequence0163 ~ 0179 7,496 Sequence0181 ~ 0286 41,209 Sequence0295 ~ 0368 29,405 Sequence0370 ~ 0390 15,534 Sequence0392 ~ 0393 615 Sequence0395 ~ 0397 1,404 Sequence0399 ~ 0400 618 Sequence0402 ~ 0413 7,270 Sequence0415 ~ 0442 15,252 Sequence0455 ~ 0466 12,807 Sequence0468 ~ 0477 2,675 Sequence0479 ~ 0479 145 Sequence0501 ~ 0512 31,236 Sequence0514 ~ 0565 108,326 Sequence0567 ~ 0616 48,913 BBOX NIR Sequence0001 ~ 0004 1,543 413,943 Sequence0006 ~ 0006 826 Sequence0008 ~ 0010 707 Sequence0013 ~ 0033 10,631 Sequence0035 ~ 0056 22,621 Sequence0058 ~ 0092 6,058 Sequence0094 ~ 0101 3,673 Sequence0103 ~ 0161 20,409 Sequence0163 ~ 0179 8,735 Sequence0181 ~ 0286 44,053 Sequence0295 ~ 0368 31,244 Sequence0370 ~ 0390 16,388 Sequence0392 ~ 0393 621 Sequence0395 ~ 0397 1,478 Sequence0399 ~ 0400 625 Sequence0402 ~ 0413 7,791 Sequence0415 ~ 0442 16,648 Sequence0455 ~ 0466 13,464 Sequence0468 ~ 0477 3,072 Sequence0479 ~ 0479 206 Sequence0501 ~ 0512 34,461 Sequence0514 ~ 0565 114,518 Sequence0567 ~ 0616 54,171 LiDAR Sequence0001 ~ 0004 calib 4 564 Sequence0006 ~ 0006 calib 1 Sequence0008 ~ 0010 calib 3 Sequence0013 ~ 0033 calib 21 Sequence0035 ~ 0056 calib 22 Sequence0058 ~ 0092 calib 35 Sequence0094 ~ 0101 calib 8 Sequence0103 ~ 0161 calib 59 Sequence0163 ~ 0179 calib 17 Sequence0181 ~ 0286 calib 106 Sequence0295 ~ 0368 calib 74 Sequence0370 ~ 0390 calib 21 Sequence0392 ~ 0393 calib 2 Sequence0395 ~ 0397 calib 3 Sequence0399 ~ 0400 calib 0 Sequence0402 ~ 0413 calib 2 Sequence0415 ~ 0442 calib 12 Sequence0455 ~ 0466 calib 28 Sequence0468 ~ 0477 calib 22 Sequence0479 ~ 0479 calib 10 Sequence0501 ~ 0512 calib 1 Sequence0514 ~ 0565 calib 12 Sequence0567 ~ 0616 calib 52 LiDAR Sequence0001 ~ 0004 pcd 50 300,258 Sequence0006 ~ 0006 pcd 1,077 Sequence0008 ~ 0010 pcd 740 Sequence0013 ~ 0033 pcd 8,299 Sequence0035 ~ 0056 pcd 19,314 Sequence0058 ~ 0092 pcd 3,574 Sequence0094 ~ 0101 pcd 2,723 Sequence0103 ~ 0161 pcd 15,517 Sequence0163 ~ 0179 pcd 5,464 Sequence0181 ~ 0286 pcd 32,783 Sequence0295 ~ 0368 pcd 23,665 Sequence0370 ~ 0390 pcd 11,792 Sequence0392 ~ 0393 pcd 364 Sequence0395 ~ 0397 pcd 1,077 Sequence0399 ~ 0400 pcd 364 Sequence0402 ~ 0413 pcd 6,821 Sequence0415 ~ 0442 pcd 12,619 Sequence0455 ~ 0466 pcd 10,610 Sequence0468 ~ 0477 pcd 2,229 Sequence0479 ~ 0479 pcd 173 Sequence0501 ~ 0512 pcd 27,244 Sequence0514 ~ 0565 pcd 81,259 Sequence0567 ~ 0616 pcd 30,987 ■ 인공지능학습용 라벨링 데이터 분포(1레벨)
■ 인공지능학습용 라벨링 데이터 분포(1레벨) 2레벨 3레벨 4레벨 이미지수 합계 (가공타입) (이미지종류) (Sequence) BBOX RGB Sequence0001 ~ 0004 1,730 384,994 Sequence0006 ~ 0006 800 Sequence0008 ~ 0010 704 Sequence0013 ~ 0033 9,806 Sequence0035 ~ 0056 20,477 Sequence0058 ~ 0092 5,407 Sequence0094 ~ 0101 3,446 Sequence0103 ~ 0161 19,719 Sequence0163 ~ 0179 7,496 Sequence0181 ~ 0286 41,209 Sequence0295 ~ 0368 29,405 Sequence0370 ~ 0390 15,534 Sequence0392 ~ 0393 615 Sequence0395 ~ 0397 1,404 Sequence0399 ~ 0400 618 Sequence0402 ~ 0413 7,270 Sequence0415 ~ 0442 15,252 Sequence0455 ~ 0466 12,807 Sequence0468 ~ 0477 2,675 Sequence0479 ~ 0479 145 Sequence0501 ~ 0512 31,236 Sequence0514 ~ 0565 108,326 Sequence0567 ~ 0616 48,913 BBOX NIR Sequence0001 ~ 0004 1,543 413,943 Sequence0006 ~ 0006 826 Sequence0008 ~ 0010 707 Sequence0013 ~ 0033 10,631 Sequence0035 ~ 0056 22,621 Sequence0058 ~ 0092 6,058 Sequence0094 ~ 0101 3,673 Sequence0103 ~ 0161 20,409 Sequence0163 ~ 0179 8,735 Sequence0181 ~ 0286 44,053 Sequence0295 ~ 0368 31,244 Sequence0370 ~ 0390 16,388 Sequence0392 ~ 0393 621 Sequence0395 ~ 0397 1,478 Sequence0399 ~ 0400 625 Sequence0402 ~ 0413 7,791 Sequence0415 ~ 0442 16,648 Sequence0455 ~ 0466 13,464 Sequence0468 ~ 0477 3,072 Sequence0479 ~ 0479 206 Sequence0501 ~ 0512 34,461 Sequence0514 ~ 0565 114,518 Sequence0567 ~ 0616 54,171 LiDAR Sequence0001 ~ 0004 - 50 300,258 Sequence0006 ~ 0006 - 1,077 Sequence0008 ~ 0010 - 740 Sequence0013 ~ 0033 - 8,299 Sequence0035 ~ 0056 - 19,314 Sequence0058 ~ 0092 - 3,574 Sequence0094 ~ 0101 - 2,723 Sequence0103 ~ 0161 - 15,517 Sequence0163 ~ 0179 - 5,464 Sequence0181 ~ 0286 - 32,783 Sequence0295 ~ 0368 - 23,665 Sequence0370 ~ 0390 - 11,792 Sequence0392 ~ 0393 - 364 Sequence0395 ~ 0397 - 1,077 Sequence0399 ~ 0400 - 364 Sequence0402 ~ 0413 - 6,821 Sequence0415 ~ 0442 - 12,619 Sequence0455 ~ 0466 - 10,610 Sequence0468 ~ 0477 - 2,229 Sequence0479 ~ 0479 - 173 Sequence0501 ~ 0512 - 27,244 Sequence0514 ~ 0565 - 81,259 Sequence0567~ 0616 - 30,987 ■ 참조데이터 - 증강데이터 분포(1레벨)
■ 참조데이터 - 증강데이터 분포(1레벨) 데이터 구분 데이터 종류 시설물종류 소계 (2레벨) (3레벨) (4레벨) 증강데이터 원천데이터 소화기구 82,326 차로규제신호등 10,291 거리유도표시 82,326 피난구유도표시 82,326 합계 257,269 라벨링데이터 소화기구 82,326 차로규제신호등 10,291 거리유도표시 82,326 피난구유도표시 82,326 합계 257,269 ■ 참조데이터 - 측위 데이터 분포(1레벨)
■ 참조데이터 - 측위 데이터 분포(1레벨) 데이터 구분 터널명 데이터 소계 (2레벨) (3레벨) 측위데이터 01_원무1터널 1건 02_남산터널 1건 03_공근터널 1건 04_횡성터널 1건 05_만종터널 1건 06_금대1터널 1건 07_치악3터널 1건 08_현곡터널 1건 09_단양터널 1건 10_죽령터널 1건 11_보문터널 1건 12_일직터널 1건 13_군위터널 1건 14_읍내터널 1건 15_금호터널 1건 16_남천터널 1건 17_고정3터널 1건 18_청도1터널 1건 19_가곡터널 1건 20_삼랑진터널 1건 21_생림2터널 1건 22_생림1터널 1건 23_무척산터널 1건 24_상동2터널 1건 25_상동1터널 1건 26_성주터널 1건 27_청라터널 1건 28_여주재터널 1건 29_칠갑산터널 1건 30_연미터널 1건 합계 30건 -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드활용 모델
모델학습
터널 및 지하차도 시설물 탐지를 위하여 다음과 같이 3개의 AI 학습모델을 활용함모델학습 모델 TASK 종류 활용 내용 (2D) NIR 이미지 기반 터널 및 지하차도 탐지 ⋅터널 내 시설물 중 8종을 학습하고, 이를 기반으로 시설물을 탐지 (2D) RGB 이미지 기반 터널 및 지하차도 탐지 ⋅자율주행차량의 터널 내 측위 보정을 위한 시설물 위치 탐지 (3D) LiDAR와 RGB 이미지 기반 터널 및 지하차도 탐지
※ Training Data : Validation Data : Test Data는 구간(sequence)를 기준으로 8:1:1 비율로 구성함
모델활용 예시
서비스 활용 시나리오
■ 터널 및 지하차도 시설물 관리 지능화
- 인공 지능 기반 터널 시설물 안전점검 자동화 기술을 이용하여 기존 안전 진단 대비 정확도 향상과 시간 단축, 시설물 관리 인력의 효율적 운영 가능
- 국내 터널 시설물 안전점검 기존 시스템은 일부 차도를 폐쇄하고 시설물의 정밀 점검을 위해 저속 운행 필요
- 개발된 모델을 활용하여 소화설비, 경보 설비 등 터널 내 설치되어있는 객체들은 차도 폐쇄 없이 실주행하며 점검 가능
■ 터널 내 자율주행차량 측위 기술 활용
- 자율주행차량에 터널 내 차량의 측위를 위하여 영상/전파/IMU/정밀지도 복합 측위 적용
- 터널 내부에 일정 거리마다 설치된 BLE 비이콘을 이용하여 자율주행차량의 터널 내 대략적인 위치 파악
- 터널 내 시설물 영상인식 정보와 터널 정밀지도 데이터를 이용한 터널 시설물 영상 항법을 통하여 자율주행차량 종방향/횡방향 정밀 위치 획득
- BLE 비이콘 측위 및 터널 시설물 영상 항법이 불가능한 지역에서는 IMU 센서를 이용한 DR(Dead Reckoning) 항법을 수행 가능
-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 RGB 이미지 객체 탐지 성능 Object Detection YOLO v4 mAP@IoU 0.5 70 % 85.21 % 2 NIR 이미지 객체 탐지 성능 Object Detection YOLO v4 mAP@IoU 0.5 70 % 85.6 % 3 3D LiDAR 객체 탐지 성능 3D Object Detection YOLO v4 mAP@IoU 0.5 70 % 81.8 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드■ 2D 바운딩박스(NIR/RGB)
데이터 구성
■ 2D 바운딩박스(NIR/RGB) 데이터 구성 key Description Type Child Type { license: 저작권 array info: [ 일반 정보 array JsonObject contributor: 기여자 string data_created: 데이터 생성일 string description: 데이터 설명 string url: 이미지 주소 string version: 가공 버전 number year: 가공 년도 number ], images: [ 이미지 정보 array JsonObject id: 이미지 고유 ID number file_name: 이미지 파일명 string width: 이미지 너비 number height: 이미지 높이 number latitude: 위도 number longitude: 경도 number time: 촬영시간 string heading: IMU Heading number pitch: IMU Pitch number roll: IMU Roll number ], categories: [ 객체 정보 array JsonObject id: 객체 고유 ID number name: 객체 이름 enum supercategory: 객체 상위 카테고리 enum ] annotations: [ 어노테이션 정보 array JsonObject id: 고유 ID number image_id: 이미지 고유 ID string category_id: 객체 고유 ID string bbox: 어노테이션 좌표 array iscrowd: 객체 군집 유무 number area: 객체 면적 number size: 객체 크기 분류 enum occluded: 가림 및 잘림 여부 number isoperation: 객체 작동 여부 string ] 어노테이션 포맷■ 2D 바운딩박스(NIR/RGB) 어노테이션 포맷 어노테이션 포맷 구분 항목명 타입 필수 설명 비고 여부 1 license array N 저작권 2 info[] array Y 일반 정보 2-1 info[].contributor string Y 기여자 2-2 info[].date_created string Y 데이터 생성일 2-3 info[].description string Y 데이터 설명 2-4 info[].url string Y 이미지 주소 2-5 info[].version number Y 가공 버전 2-6 info[].year number Y 가공 년도 3 images[] array Y 이미지 정보 3-1 images[].id number Y 이미지 고유 ID 3-2 images[].file_name string Y 이미지 파일명 3-3 images[].width number Y 이미지 너비 0~2448 3-4 images[].height number Y 이미지 높이 0~2048 3-5 images[].latitude number Y 위도 32.12345 3-6 images[].longitude number Y 경도 127.12355 3-7 images[].time string Y 촬영시간 hh:mm:ss 3-8 images[].heading number Y IMU Heading 3-9 images[].pitch number Y IMU Pitch 3-10 images[].roll number Y IMU Roll 4 categories[] array Y 객체 정보 4-1 categories[].id number Y 객체 고유 ID 4-2 categories[].name enum Y 객체 이름 "소화기구", "옥내소화전설비", "제연설비", "터널입구정보표지판", "진입차단표지판", "차로이용규제신호등", "거리유도표시", "피난구유도표시" 4-3 categories[].supercategory enum Y 객체 상위 카테고리 "소화설비", "소화활동설비", "경보설비", "피난설비" 5 annotations[] array Y 어노테이션 정보 5-1 annotations[].id number Y 고유 ID 5-2 annotations[].image_id string Y 이미지 고유 ID 5-3 annotations[].category_id string Y 객체 고유 ID 5-4 annotations[].bbox array Y 어노테이션 좌표 xtl, ytl, width, height] 5-5 annotations[]iscrowd number Y 객체 군집 유무 5-6 annotations[].area number Y 객체 면적 5-7 annotations[].size enum Y 객체 크기 분류 “S”, “M”,”L” 5-8 annotations[].occluded number Y 가림 및 잘림 여부 0, 1 5-9 annotations[].isoperation string Y 객체 작동 여부 “true”, “false” 실제 예시
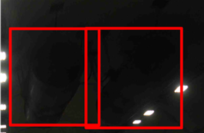
■ 2D 바운딩박스(NIR/RGB) 실제 예시 실제 예시 대상시설물 원천데이터 예시 가공데이터 예시 RGB
이미지
소화기구 
옥내소화전설비 
제연설비 
터널입구정보 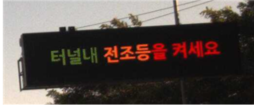
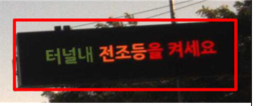
표시판 진입차단표지판 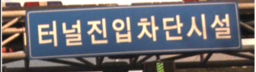
차로이용규제신호등 

거리유도표시 

피난구유도표시 
"license": "NIA",
"info": [
{
"contributor": "Testworks",
"data_created": "2022-08-22 15:49:19",
"description": "Sequence0001",
"url": "https://aiworks.co.kr/",
"version": 1.0,
"year": 2022
}
],
"images": [
{
"id": 84,
"file_name": "NIR_Sequence0001_000085.jpg",
"width": 2448,
"height": 2048,
"latitude": 127.0548224,
"longitude": 37.4739406,
"time": "15:00:42",
"heading": 0.0,
"pitch": 2.49702,
"roll": 231.32821
}
],
"categories": [
[
{
"id": 0,
"name": "소화기구",
"supercategory": "소화설비"
},
{
"id": 1,
"name": "옥내소화전설비",
"supercategory": "소화설비"
},
{
"id": 2,
"name": "제연설비",
"supercategory": "소화활동설비"
},
{
"id": 3,
"name": "터널입구정보표지판",
"supercategory": "경보설비"
},
{
"id": 4,
"name": "진입차단표지판",
"supercategory": "경보설비"
},
{
"id": 5,
"name": "차로이용규제신호등",
"supercategory": "경보설비"
},
{
"id": 6,
"name": "거리유도표시",
"supercategory": "피난설비"
},
{
"id": 7,
"name": "피난구유도표시",
"supercategory": "피난설비"
}
]
],
"annotations": [
{
"id": 0,
"image_id": 84,
"category_id": 0,
"bbox": [
1454.43,
1281.79,
28.37,
43.79
],
"iscrowd": 0,
"area": 1242.32,
"size": "M",
"occluded": 0,
"isoperation": "true"
},
{
"id": 1,
"image_id": 84,
"category_id": 1,
"bbox": [
1446.8,
1335.72,
36.46,
60.68
],
"iscrowd": 0,
"area": 2212.39,
"size": "M",
"occluded": 0,
"isoperation": "true"
}
]
}■ 3D 큐보이드(LiDAR) 데이터 구성
■ 3D 큐보이드(LiDAR) 데이터 구성 key Description Type Child Type { mode: 가공모드 string images: [ 이미지 정보 array image_id 이미지 고유 ID number name 이미지 파일명 string latitude 위도 number longitude 경도 number time 촬영시간 string heading IMU heading number pitch IMU pitch number roll IMU roll number objects[ 객체 정보 array JsonObject position 라벨링 데이터 원점 number scale 객체 크기 number rotation 객체 회전각 number area 객체 면적 number size 객체 크기 분포 enum obj_type 객체 명 enum obj_id 객체 분류 코드 number ] string ] } 어노테이션 포맷■ 3D 큐보이드(LiDAR) 어노테이션 포맷 어노테이션 포맷 구분 항목명 타입 필수 설명 비고 여부 1 mode string N 가공모드 2 images[] array Y 이미지 정보 2-1 images[].image_id number Y 이미지 고유 ID 2-2 images[].name string Y 이미지 파일명 2-3 images[].latitude number N 위도 32.12345 2-4 images[].longitude number N 경도 127.12355 2-5 images[].time string Y 촬영시간 hh:mm:ss 2-6 images[].heading number N IMU heading 0~360 2-7 images[].pitch number N IMU pitch -999~ 999 2-8 images[].roll number N IMU roll -999~ 999 2-9 images[].objects[] array Y 객체 정보 2-9-1 images[].objects[].position number Y 라벨링 데이터 원점 0~999 2-9-2 images[].objects[].scale number Y 객체 크기 0~999 2-9-3 images[].objects[].rotation number Y 객체 회전각 0~999 2-9-4 images[].objects[].area number Y 객체 면적 2-9-5 images[].objects[].size enum Y 객체 크기 분포 “S”, “M”,”L” 2-9-6 images[].objects[].obj_type enum Y 객체 명 2-9-7 images[].objects[].obj_id number N 객체 분류 코드 실제 예시
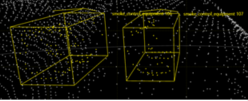
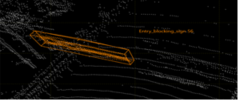
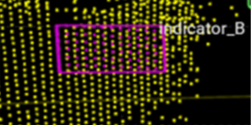
■ 3D 큐보이드(LiDAR) 실제 예시 실제 예시 대상시설물 원천데이터 예시 가공데이터 예시 LiDAR
이미지소화기구 

옥내소화전설비 

제연설비 
터널입구정보 
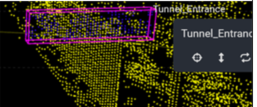
표시판 진입차단표지판 
차로이용규제신호등 

거리유도표시 

피난구유도표시 
{
"mode": "lidar",
"images": [
{
"image_id": 210,
"name": "PCD_Sequence0001_000211.pcd",
"latitude": 127.0546575,
"longitude": 37.4738342,
"time": "15:00:42",
"heading": 0.0,
"pitch": 2.95085,
"roll": 230.6862,
"objects": [
{
"position": [
14.436059756186213,
-3.10484340146699,
-0.03344200551509857
],
"scale": [
0.09036279316724859,
0.10353635263007545,
0.3664197325706482
],
"rotation": [
0,
0,
-1.612699426154943
],
"area": 0.003428162198851967,
"size": "M",
"obj_type": "a_fire_extinguisher",
"obj_id": 101
}
]
}
] -
데이터셋 구축 담당자
수행기관(주관) : ㈜테스트웍스
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 동길무 02-423-5166 [email protected] 사업관리 및 데이터 가공 수행기관(참여)
수행기관(참여) 기관명 담당업무 맵퍼스 데이터 수집 한국자동차연구원 데이터 설계 및 정제 와이파이브 AI 모델 개발 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 동길무 02-423-5166 [email protected]
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 [email protected] 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.