저해상도 라이다의 해상도 개선을 위한 Point-cloud Super-resolution 데이터
- 분야교통물류
- 유형 이미지
-
데이터 변경이력
데이터 변경이력 버전 일자 변경내용 비고 1.1 2023-11-17 데이터 최종 개방 1.0 2023-07-31 데이터 개방(Beta Version) 데이터 히스토리
데이터 히스토리 일자 변경내용 비고 2023-12-27 산출물 전체 공개 소개
Super-resolution 기술을 이용하여 저해상도 라이다 데이터를 고해상도 라이다 데이터로 추론하여 객체 인식 성능을 향상시킬 수 있는 학습데이터 제공
구축목적
대부분의 라이다의 경우 점군 해상도를 향상시키기 위해서는 채널 수에 비례하는 많은 양의 송/수신 소자를 포함해야 하기 때문에 제품의 가격이 크게 증가하여 실제 산업에서의 활용성이 저하됨. 인공지능 학습용 데이터에 기반한 Super-resolution 기술은 중/저해상도 라이다 센서의 해상도 저하에 따른 라이다 객체 인식 성능 저하를 개선할 수 있는 기술임
-
메타데이터 구조표 데이터 영역 교통물류 데이터 유형 이미지 데이터 형식 PCD 데이터 출처 수집장치를 부착한 차량의 도로주행 라벨링 유형 3D Segmentation 라벨링 형식 JSON 데이터 활용 서비스 자율주행 분야 인공지능, 3D 데이터 활용서비스 데이터 구축년도/
데이터 구축량2022년/원천데이터 (저해상도 LiDAR, 형식:PCD) - 50,000장 / 원천데이터 (고해상도 LiDAR, 형식:PCD) - 50,000장 / 라벨링데이터 (저해상도 LiDAR, 형식:JSON) - 50,000장 / 라벨링데이터 (고해상도 LiDAR, 형식:JSON) - 50,000장 -
1. 데이터 구축 규모
1) 원천데이터데이터 구축 규모 - 원천데이터 센서종류 유형 포맷 해상도 규모(파일수) 저해상도 LiDAR 포인트클라우드 pcd 32CH 50,000장 고해상도 LiDAR 128CH 50,000장 2) 라벨링 데이터
데이터 구축 규모 - 라벨링 데이터 데이터 종류 유형 포맷 해상도 규모(파일수) 고해상도 LiDAR 라벨링 데이터 3D 객체 검출정보 데이터 json 32CH 50,000장 저해상도 LiDAR 라벨링 데이터 128CH 50,000장 3) 참조데이터
데이터 구축 규모 - 참조데이터 센서종류 유형 포맷 해상도 규모(파일수) Camera 정지영상(이미지) - 전 png 1920 X 1080 50,000장 정지영상(이미지) - 후 png 1920 X 1080 50,000장 정지영상(이미지) - 좌 png 1920 X 1080 50,000장 정지영상(이미지) - 우 png 1920 X 1080 50,000장 GPS 텍스트 csv 50,000장 반사강도 reflec_L png 50,000장 reflec_H png 50,000장 정합 데이터 라이다-이미지 센서
캘리브레이션 정보txt 2장 2. 데이터 분포
1) Training데이터 분포 - Training 구분 1차 경로 2차경로 파일포맷 제출수량 합계 원천데이터 수집차량_1 lidar_H pcd 559 79,998 lidar_L pcd 559 수집차량_2 lidar_H pcd 39,440 lidar_L pcd 39,440 라벨링데이터 수집차량_1 json_H json 559 79,998 json_L json 559 수집차량_2 json_H json 39,440 json_L json 39,440 2) Validation
데이터 분포 - Validation 분류 1차 경로 2차경로 파일포맷 제출수량 합계 원천데이터 수집차량_1 lidar_H pcd 71 10,002 lidar_L pcd 71 수집차량_2 lidar_H pcd 4,930 lidar_L pcd 4,930 라벨링데이터 수집차량_1 json_H json 71 10,002 json_L json 71 수집차량_2 json_H json 4,930 json_L json 4,930 3) Test
데이터 분포 - Test 분류 1차 경로 2차경로 파일포맷 제출수량 합계 원천데이터 수집차량_1 lidar_H pcd 70 10,000 lidar_L pcd 70 수집차량_2 lidar_H pcd 4,930 lidar_L pcd 4,930 라벨링데이터 수집차량_1 json_H json 70 10,000 json_L json 70 수집차량_2 json_H json 4,930 json_L json 4,930 4) Other (참조데이터)
데이터 분포 - Other (참조데이터) 분류 1차 경로 2차경로 파일포맷 제출 수량 합계 Training 수집차량_1 gps csv 559 279,995 image_B png 559 image_F png 559 image_L png 559 image_R png 559 lidar-image_calib txt 1 reflec_H png 559 reflec_L png 559 수집차량_2 gps csv 39,440 image_B png 39,440 image_F png 39,440 image_L png 39,440 image_R png 39,440 lidar-image_calib txt 1 reflec_H png 39,440 reflec_L png 39,440 Validation 수집차량_1 gps csv 71 35,009 image_B png 71 image_F png 71 image_L png 71 image_R png 71 lidar-image_calib txt 1 reflec_H png 71 reflec_L png 71 수집차량_2 gps csv 4,930 image_B png 4,930 image_F png 4,930 image_L png 4,930 image_R png 4,930 lidar-image_calib txt 1 reflec_H png 4,930 reflec_L png 4,930 Test 수집차량_1 gps csv 70 35,002 image_B png 70 image_F png 70 image_L png 70 image_R png 70 lidar-image_calib txt 1 reflec_H png 70 reflec_L png 70 수집차량_2 gps csv 4,930 image_B png 4,930 image_F png 4,930 image_L png 4,930 image_R png 4,930 lidar-image_calib txt 1 reflec_H png 4,930 reflec_L png 4,930 5) 가공 객체 수량
데이터 분포 - 가공 객체 수량 고해상도(128ch)라이다 라벨링 데이터 저해상도(32ch)라이다 라벨링 데이터 분류 클래스 객체수 분류 클래스 객체수 동적객체 Car 326,206 동적객체 Car 272,831 Two-wheel vehicle 15,258 Two-wheel vehicle 11,382 Pedestrian 42,481 Pedestrian 34,820 정적객체 Road 50,027 정적객체 Road 48,603 Sidewalk 16,240 Sidewalk 15,760 Structure 7,695 Structure 7,624 Trunk 115,777 Trunk 74,251 Fence 35,260 Fence 34,347 Pole 204,259 Pole 132,999 Traffic Sign 31,378 Traffic Sign 27,485 Traffic Light 9,960 Traffic Light 6,590 합계 854,541 합계 660,702 -
-
AI 모델 상세 설명서 다운로드
AI 모델 상세 설명서 다운로드 AI 모델 다운로드1. 3D AI 활용 모델 설명
3D AI 활용 모델 설명 개발 언어 Python 3.8.5 프레임워크 CUDA V11.0.221 Pytorch 1.7.1+cu110 학습 알고리즘 SPVConv(Sparse Point-Voxel Convolution)
고해상도 포인트 클라우드 데이터의 고유한 속성을 유지하면서 제한된 하드웨어 리소스에서 어려웠던 여러 개의 작은 개체의 성능을 향상시키는 경량 3D 모듈인 SPVConv 구성된 새로운 네트워크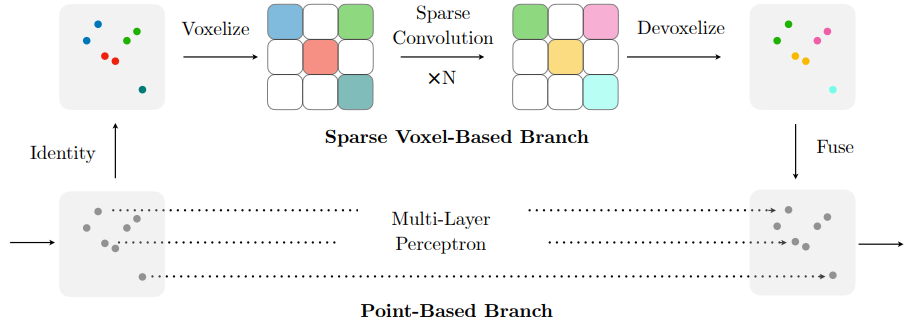
학습 조건 epoch 15 batch 2 optimizer = SGD loss = Cross Entropy lr_scheduler = cosine_schedule_with_warmup 파일 형식 • 원천 데이터: PCD • 라벨링 데이터: JSON 모델 학습 과정별 데이터
분류 및 비율 정보- Training Set 약 83% (41,830장) - Validation Set 약 8% (3,980장) - Test Set 약 9% (4,190장) 서비스 활용 시나리오
32CH 라이다 데이터를 이용해서 고해상도 라이다 데이터 (PCD) 생성 및 활용
1, 고주행의 자율주행 차량을 구성하기 위해선 원거리 감지 기능이 중요한 요소임. 그러나 고해상도 라이다 센서는 저해상도 라이다 센서에 비해 약 5배 정도 되는 가격 처리를 보이며, 실제 차량 적용에는 부담스러운 금액임. 따라서 저해상도 라이다 센서를 이용하여 고해상도 라이다 센서를 모사할 수 있는 super-resolution 기술이 필요2. 인공지능 학습용 데이터에 기반한 Super-resolution 기술은 중/저해상도 라이다 센서 데이터를 기반으로 고해상도 라이다 데이터를 생성함으로써, 중/저해상도 라이다 센서의 해상도 저하에 따른 라이다 객체 인식 성능 저하를 개선하는데 기여함
서비스 활용 예시
- 인공지능 학습용 데이터에 기반한 Super-resolution 기술은 중/저해상도 라이다 센서 데이터를 기반으로 고해상도 라이다 데이터를 생성
-
데이터 성능 점수
측정값 (%)기준값 (%)데이터 성능 지표
데이터 성능 지표 번호 측정항목 AI TASK 학습모델 지표명 기준값 점수 측정값 점수 1 Super-resoution AI 학습 모델 평가 Object Detection Implicit LiDAR Network IoU 18 % 22.4 % 2 객체 탐지 성능 (SPVConv) (고해상도 데이터) Object Detection SPVConv mIoU 30 % 51.9 % 3 객체 탐지 성능 (SPVConv) (저해상도 데이터) Object Detection SPVConv mIoU 18 % 42.3 %
※ 데이터 성능 지표가 여러 개일 경우 각 항목을 클릭하면 해당 지표의 값이 그래프에 표기됩니다.
※ AI모델 평가 지표에 따라 측정값의 범위, 판단 기준이 달라질 수 있습니다. (ex. 오류율의 경우, 낮을수록 좋은 성능을 내는 것으로 평가됩니다)
-
설명서 및 활용가이드 다운로드
데이터 설명서 다운로드 구축활용가이드 다운로드1. 데이터 설명
1) 클래스종류데이터 설명 - 클래스종류 분류 클래스 클래스ID 설명 동적객체 Car 10 승용차, SUV, 버스, 트럭 등 모든 차량 Two-wheel vehicle 15 무동력으로 움직일 수 있는 자전거 일체 엔진 동력으로 움직일 수 있는 모터사이클 일체, 전동휠 등 Pedestrian 30 도로, 인도, 횡단보도 등의 공간에 위치한 사람 일체 정적객체 Road 40 차량이 다닐 수 있는 도로 영역 Sidewalk 48 보행자도로 Structure 52 육교, 다리, 터널, 톨게이트 등 도로 상에 위치한 구조물 Trunk 71 가로수 등 나무의 몸통, 줄기 Fence 51 철재, 석재 등 도로 영역 과의 차단 목적의 울타리, 중앙분리대 Pole 80 전봇대, 가로등, 신호등 지주 등 수직 방향의 구조물 Traffic Sign 81 교통 표지판 Traffic Light 99 신호등 2) 도로유형별 분류
데이터 설명 - 도로유형별 분류 도로유형 도심로 자동차전용도로 3) 도로형태별 분류
데이터 설명 - 도로형태별 분류 - 도심로 도심로 도로형태 코드번호 도로상황 단일로 A01 버스 정지 A02 측방 이륜차 A03 측방 이륜차 컷인 A04 전방이륜차 추종 A05 도로내 평행이동 보행자 A06 차로 변경, 전방 대항차량 A07 직선/곡선로 대항차량 A08 직선/곡선로 대항이륜차 A16 전방차량 추종 교차로 A09 교차로 대항차량 합류 A10 교차로 측면 대항차량 A11 교차로 이륜차 합류 A12 교차로 측방 이륜차 좌/우회전 A13 교차로 이륜차 도로횡단 A14 교차로 보행자 도로횡단 A15 유턴, 전방 대항차량 데이터 설명 - 도로형태별 분류 - 자동차전용도로 자동차전용도로 도로형태 코드번호 도로상황 단일로 B01 차로유지 B02 차량 추종 B03 졸음쉼터 진/출입 B04 터널 진/출입 B05 컷인차량 B06 차로변경 B07 차량 앞지르기 B08 차로합류 B09 톨게이트 진입/합류 B10 차로 분기 4) 시간대 / 날씨 / 계절 분류
데이터 설명 - 시간대 / 날씨 / 계절 분류 시간대 분류 날씨 분류 계절 분류 시간대 유형 코드 날씨유형 코드 계절 유형 코드 일출 sunrise 맑음 clear 봄 spring 주간 day 강우 rain 여름 summer 일몰 sunset 안개 fog 가을 autumn 야간 night 겨울 winter 5) 폴더구조
데이터 설명 - 폴더구조 1.Training 원천데이터 수집차량_1 lidar_H lidar_L 수집차량_2 lidar_H lidar_L 라벨링데이터 수집차량_1 json_H json_L 수집차량_2 json_H json_L 2.Validation 원천데이터 수집차량_1 lidar_H lidar_L 수집차량_2 lidar_H lidar_L 라벨링데이터 수집차량_1 json_H json_L 수집차량_2 json_H json_L 3.Test 원천데이터 수집차량_1 lidar_H lidar_L 수집차량_2 lidar_H lidar_L 라벨링데이터 수집차량_1 json_H json_L 수집차량_2 json_H json_L 5.Other Training 수집차량_1 gps image_B image_F image_L image_R lidar-image_calib reflec_H reflec_L 수집차량_2 gps image_B image_F image_L image_R lidar-image_calib reflec_H reflec_L Validation 수집차량_1 gps image_B image_F image_L image_R lidar-image_calib reflec_H reflec_L 수집차량_2 gps image_B image_F image_L image_R lidar-image_calib reflec_H reflec_L Test 수집차량_1 gps image_B image_F image_L image_R lidar-image_calib reflec_H reflec_L 수집차량_2 gps image_B image_F image_L image_R lidar-image_calib reflec_H reflec_L 6) 파일명 구조
데이터 설명 - 파일명 구조 파일 종류 파일 이름 2D IMAGE 데이터 <수집기관>_<도로형태>_<도로상황>__<날씨>_<계절>_<일련번호>_<카메라위치>.png Annotation 데이터 <수집기관>_<도로형태>_<도로상황>_<해상도>_<날씨>_<계절>_<일련번호>.json 3D LiDAR 데이터 <수집기관>_<도로형태>_<도로상황>_<해상도>_<날씨>_<계절>_<일련번호>.pcd 2. 어노테이션 포맷
어노테이션 포맷 NO 항목명 길이 타입 필수 비고 한글명 영문명 1 어노테이션정보 annotations 데이터 라벨링 정보 1-1 삼차원포인트정보 3D_points array Y 객체 영역 정보 [x y, z] 1-2 클래스 class 16 string Y 객체의 클래스 1-3 클래스식별자 class_ID 2 number Y 클래스 고유 번호 1-4 거리 distance 20 number Y ego차량과 객체 간 거리 1-5 객체식별자 id 4 number Y 객체 고유 번호 1-6 라벨링타입 labeling_type 24 string Y 데이터 라벨링 방식 2 수집기관 company 2 string Y 원시데이터 수집 기관 3 파일명 pcd_filename 50 string Y 원천데이터 파일명 4 코드정보 road 3 string Y 시나리오 코드명 5 계절 season 6 string Y 원시데이터가 수집된 계절 6 센서정보 sensor 4 string Y 라이다 센서 종류 7 시간 time 7 string Y 원시데이터가 수집된 시간대 8 날씨 weather 5 string Y 원시데이터가 수집된 날씨 3. 예시
예시 - 원천데이터 원천데이터 

<고해상도 라이다 라벨링 데이터> <저해상도 라이다 라벨링 데이터> 예시 - 라벨링 상태 이미지 라벨링 상태 이미지 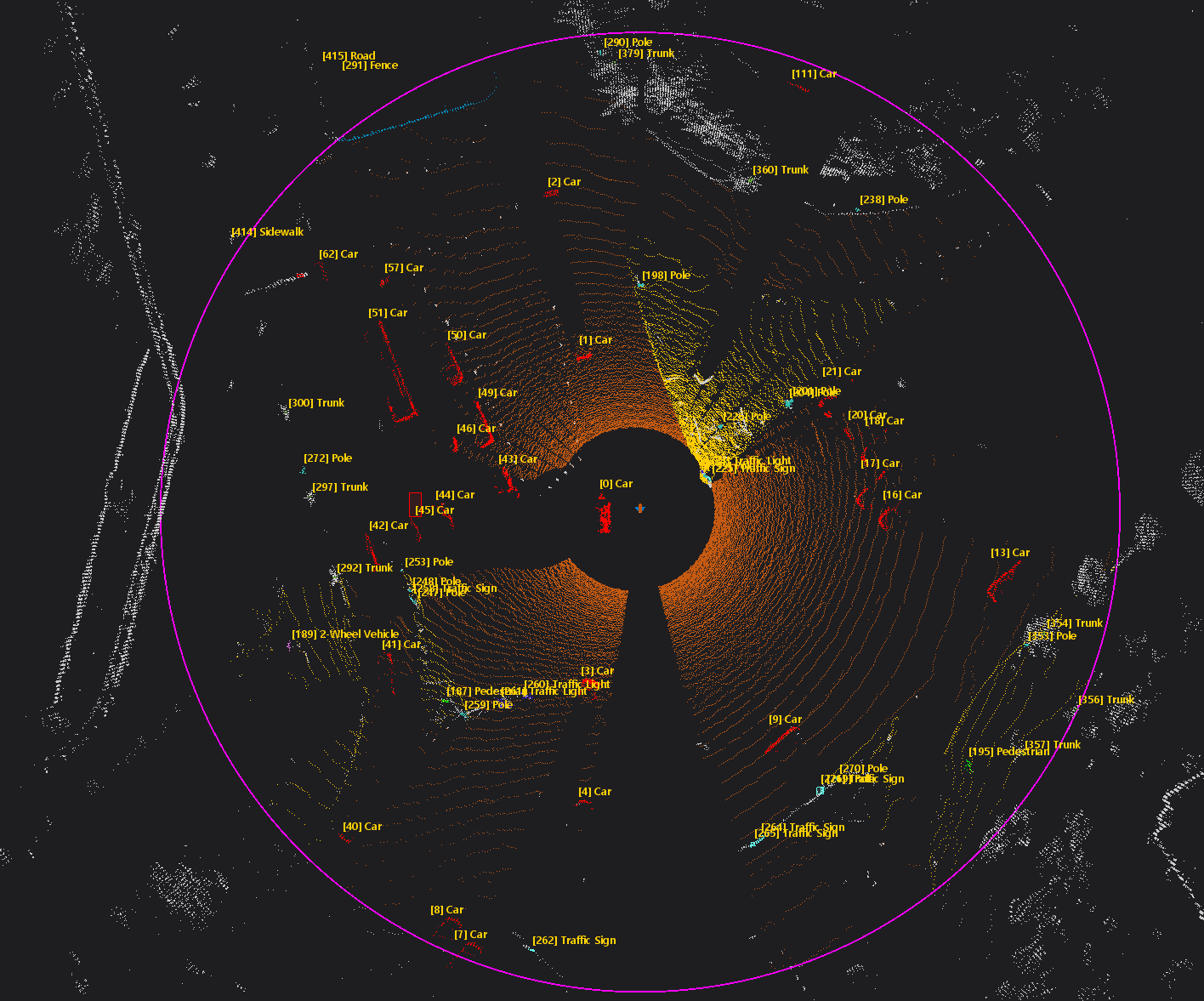
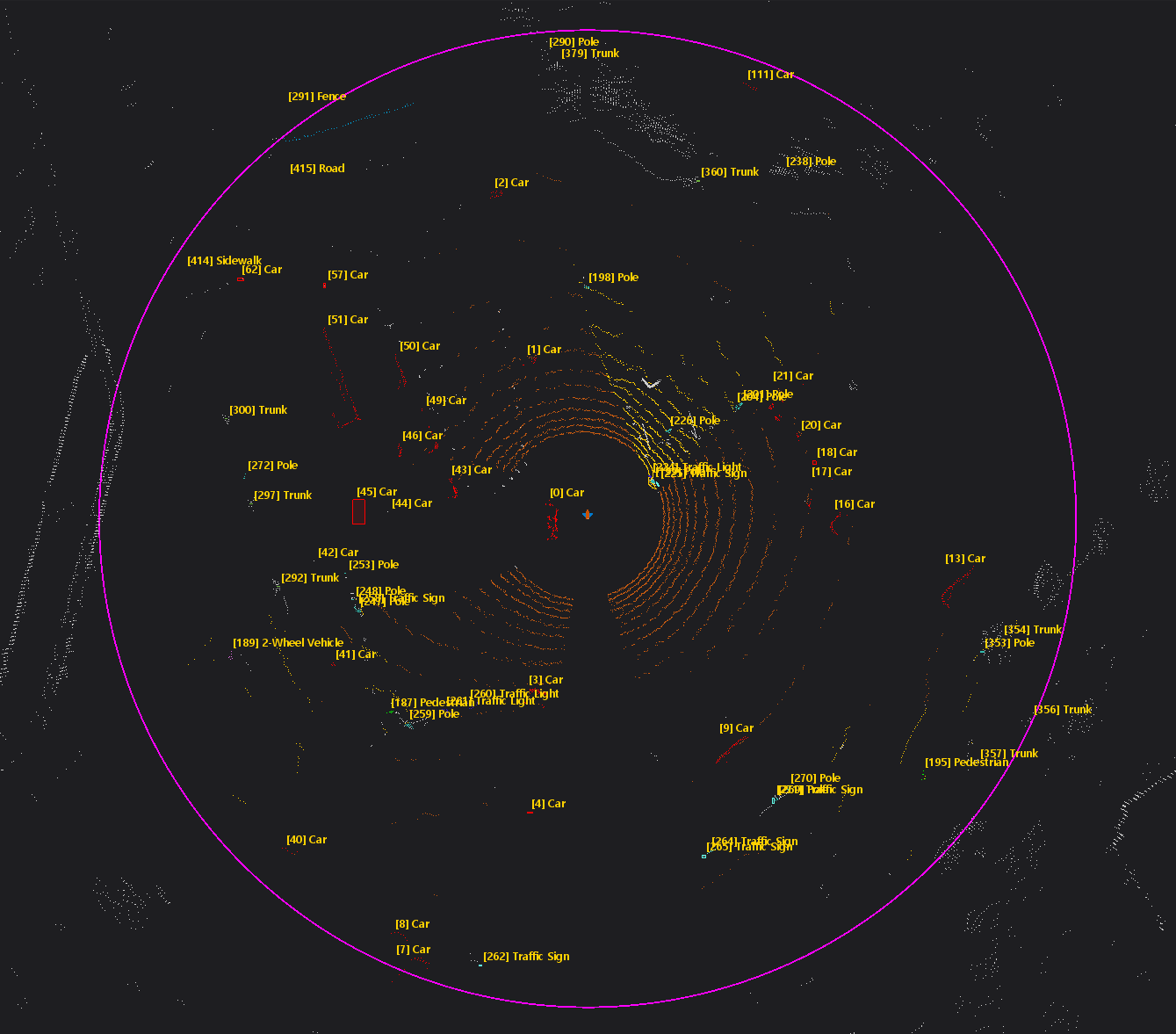
<고해상도 라이다 데이터> <저해상도 라이다 데이터> 예시 - JSON 파일 JSON 파일 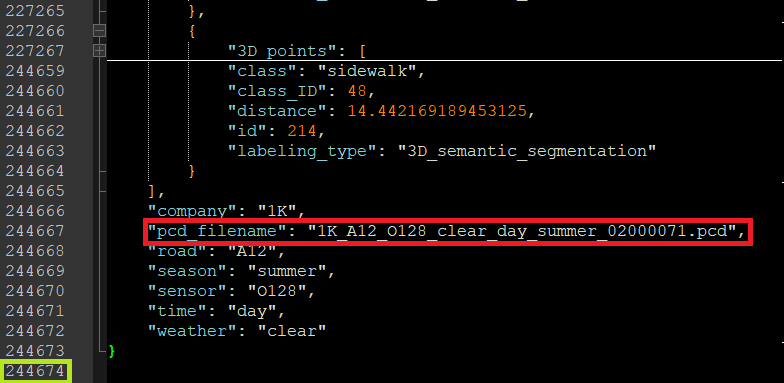
<고해상도 라이다 JSON 파일> 
<저해상도 라이다 JSON 파일> -
데이터셋 구축 담당자
수행기관(주관) : ㈜컴버스테크
수행기관(주관) 책임자명 전화번호 대표이메일 담당업무 남용태 02-6299-5151 [email protected] 데이터 정제 / 데이터 가공 / 품질 관리 / AI 모델링 및 유효성 검증 / 외부 품질검증 대응 수행기관(참여)
수행기관(참여) 기관명 담당업무 한국자동차연구원 데이터 구조 및 시나리오 설계 / 데이터 수집 ㈜뷰런테크놀로지 데이터 수집 ㈜에스유엠 데이터 수집 ㈜브레인컨테이너 데이터 가공 데이터 관련 문의처
데이터 관련 문의처 담당자명 전화번호 이메일 남용태 02-6299-5151 [email protected]
-
인터넷과 물리적으로 분리된 온라인·오프라인 공간으로 의료 데이터를 포함하여 보안 조치가 요구되는 데이터를 다운로드 없이 접근하고 분석 가능
* 온라인 안심존 : 보안이 보장된 온라인 네트워크를 통해 집, 연구실, 사무실 등 어디서나 접속하여 데이터에 접근하고 분석
* 오프라인 안심존 : 추가적인 보안이 필요한 데이터를 대상으로 지정된 물리적 공간에서만 접속하여 데이터에 접근하고 분석 -
- AI 허브 접속
신청자 - 안심존
사용신청신청자신청서류 제출* - 심사구축기관
- 승인구축기관
- 데이터 분석 활용신청자
- 분석모델반출신청자
- AI 허브 접속
-
1. 기관생명윤리위원회(IRB) 심의 결과 통지서 [IRB 알아보기] [공용IRB 심의신청 가이드라인]
2. 기관생명윤리위원회(IRB) 승인된 연구계획서
3. 신청자 소속 증빙 서류 (재직증명서, 재학증명서, 근로계약서 등 택1)
4. 안심존 이용 신청서 [다운로드]
5. 보안서약서 [다운로드]
※ 상기 신청서 및 첨부 서류를 완비한 후 신청을 진행하셔야 정상적으로 절차가 이루어집니다. -
신청 및 이용관련 문의는 [email protected] 또는 02-525-7708, 7709로 문의
데이터셋 다운로드 승인이 완료 된 후 API 다운로드 서비스를 이용하실 수 있습니다.
API 다운로드 파일은 분할 압축되어 다운로드 됩니다. 분할 압축 해제를 위해서는 분할 압축 파일들의 병합이 필요하며 리눅스 명령어 사용이 필요합니다.
리눅스 OS 계열에서 다운로드 받으시길 권장하며 윈도우에서 파일 다운로드 시 wsl(리눅스용 윈도우 하위 시스템) 설치가 필요합니다.
※ 파일 병합 리눅스 명령어
find "폴더경로" -name "파일명.zip.part*" -print0 | sort -zt'.' -k2V | xargs -0 cat > "파일명.zip"
- 해당 명령어 실행 시, 실행 경로 위치에 병합 압축 파일이 생성됩니다.
- 병합된 파일 용량이 0일 경우, 제대로 병합이 되지 않은 상태이니 "폴더경로"가 제대로 입력되었는지 확인 부탁드립니다.
※ 데이터셋 소개 페이지에서 다운로드 버튼 클릭하여 승인이 필요합니다.